Mission
Bridging the gap between resource-constrained microcontrollers and larger processors in robotic applications that are based on the Robot Operating System.
Why Microcontrollers?
Microcontrollers are used in almost every robotic product. Typical reasons are:
- Hardware access
- Hard, low-latency real-time
- Power saving
Another important reason is safety, but note that micro-ROS is not developed according to any safety standard.
Check our complete supported hardware list.
News
Read about the latest developments in our blog or attend the next ROS 2 Embedded Working Group Meeting, which take place online on a monthly basis. The meeting link can be found in the ROS 2 Events calendar.
Key Features
- Microcontroller-optimized client API supporting all major ROS concepts
- Seamless integration with ROS 2
- Extremely resource-constrained but flexible middleware
- Multi-RTOS support with generic build system
- Permissive license
- Vibrant community and ecosystem
- Long-term maintainability and interoperability
- Natively integrated into Vulcanexus, the all-in-one ROS 2 tools set
- Much more...
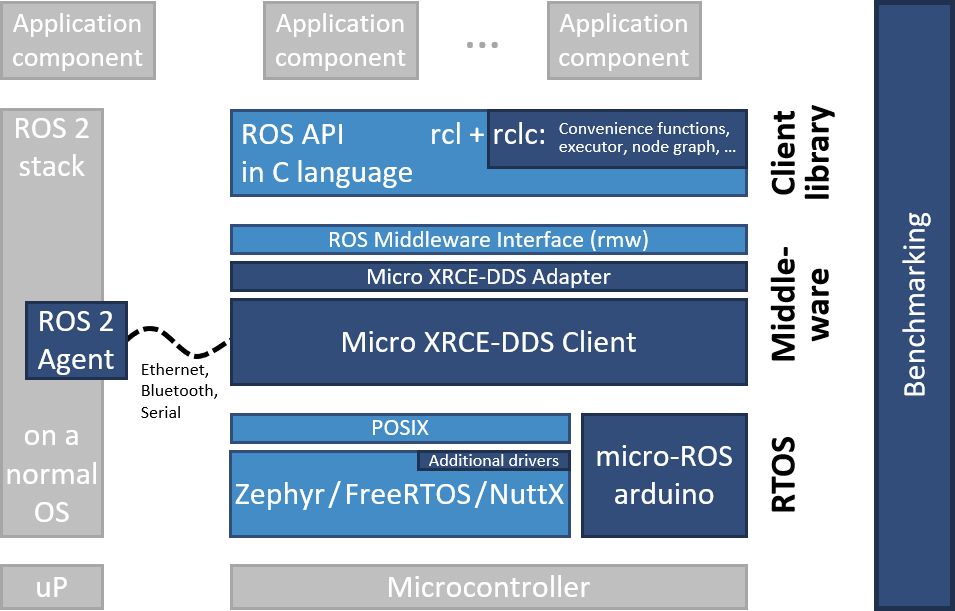
Architecture
The architecture of the micro-ROS stack follows the ROS 2 architecture. Dark blue components are developed specifically for micro-ROS. Light blue components are taken from the standard ROS 2 stack.
Questions
We are looking forward to answer your questions on concepts and development! You have the choice:
- ROS Discourse (in category “embedded”)
- Robotics StackExchange (tag with “embedded”)
- ROS Answers archive
- micro-ROS Slack Channel
Getting Started
Our tutorials and demos give you a quick start with micro-ROS. The basic tutorials can even be completed without a microcontroller.
Commercial support
eProsima provides commercial support to boost micro-ROS projects:
- Port micro-ROS to your platform (HW, RTOS, transport)
- Efficient & reliable communication layer between μC and DDS Data Space (ROS 2)
- Customized features development
- Architectural studies
Source Code
Source code can be found at github.com/micro-ROS. It comes under the permissive license Apache 2.0 just as the standard ROS 2 stack.
The primary repository is micro_ros_setup, which provides command line scripts for creating your first micro-ROS application.
Dockers available for Humble and Iron at eProsima download website.
micro-ROS represents one of four exclusive elements of Vulcanexus, the all-in-one ROS 2 tool set. Vulcanexus offers free Dockers for Humble and Iron.
Developed an new feature or found a bug? We answer both Github pull requests and issues.
Book chapter
The chapter 'Micro-ROS' in Volume 7 of Springer's ROS Book Series gives a comprehensive overview to the whole micro-ROS stack. A reading sample is available on Google Books.