micro-ROS Crazyflie demo
This demos aims to show the benefits of micro-ROS regarding its low resource consumption and its extensible and modular communication system. In particular, it is focused on the micro-ROS’s middleware layer where eProsima Micro XRCE-DDS is the default implementation. This software, base on the DDS-XRCE wire protocol, offers to micro-ROS client-server communication with the following characteristics:
- Multi-transport protocol support (UDP, TCP and Serial).
- Peer-to-peer communication.
- Server discovery.
- Best-effort and reliable communication.
- Message fragmentation.
Each one of the aforementioned characteristics will be used around this demo.
Scenario
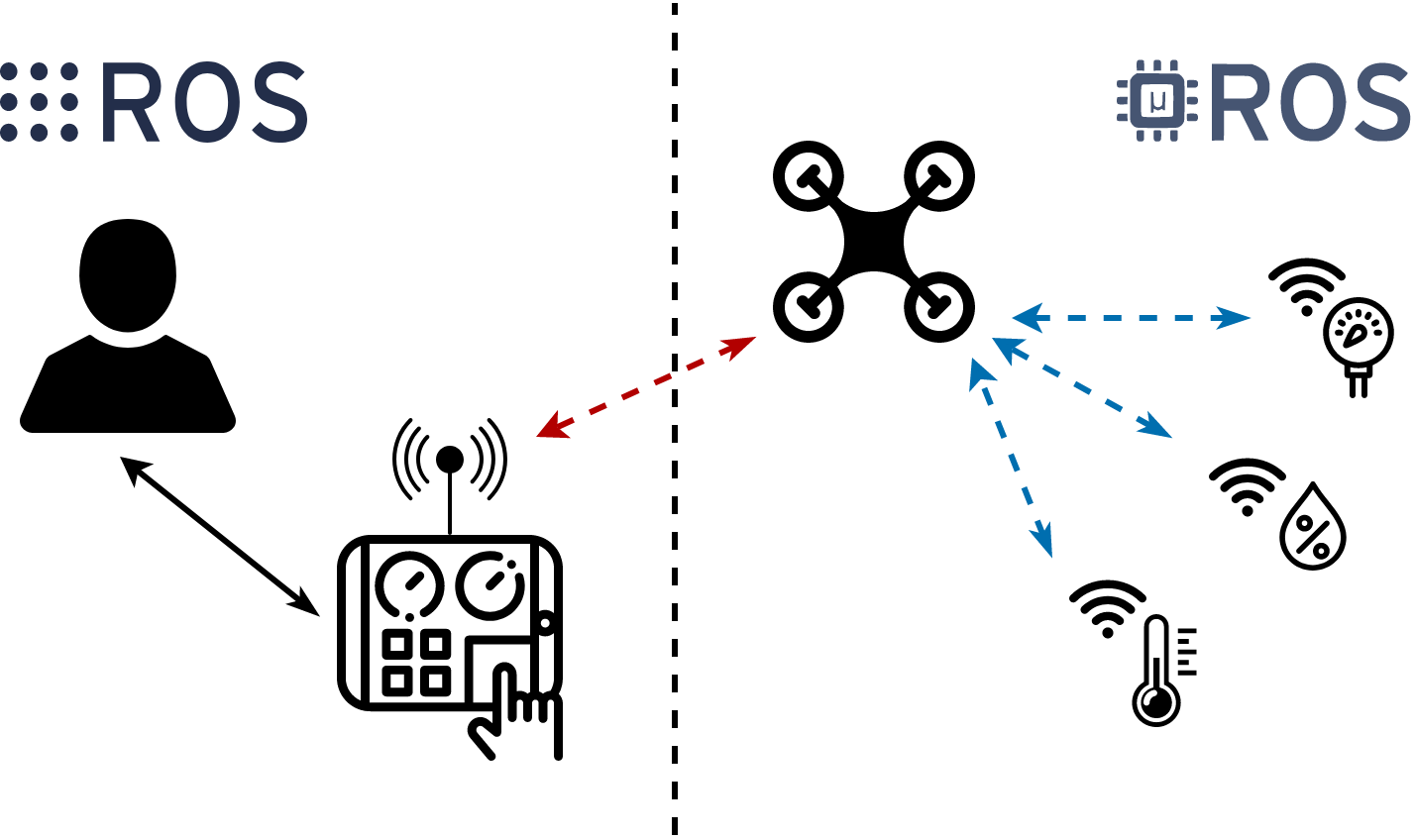
An MAV (Micro Aerial Vehicle) overflies a given area commanded by a Flight Operator through a GCS (Ground Control Station). Remote Sensors, distributed over the area, takes environmental measures (temperature, pressure and humidity). The Flight Operator shall command the MAV toward the Remote Sensors and once positioned over them, the MAV shall establish a connection with the Remote Sensors in order to gather its data. Finally, the Fligh Operator shall command the MAV toward the home position.
Actors & Topics
In this demo there are three different micro-ROS actors (MAV, GCS and Remote Sensors) which publish/subscribe to/from six topics:
/drone/odometry: MAV’s odometry./drone/attitude: MAV’s attitude./flight/cmd: flight commands./sensor/temperature: Remote Sensors’ temperature./sensor/pressure: Remote Sensors’ pressure./sensor/humidity: Remote Sensors’ humidity.
MAV
A Crazyflie 2.1 running a micro-ROS-Client application which is in charge of publishing its attitude and odometry, and subscribing to flight commands and Remote Sensor’ data.
GCS
A general-purpose computer running a micro-ROS-Agent application which is in charge of publishing flight commands, and subscribing to MAV’s attitude and odometry data.
Remote Sensors
A SparkFun Wheather Station connecting to a Raspberry Pi 3A+ which is running a micro-ROS-Agent and a micro-ROS-Client application in charge of publishing the Remote Sensors’ data.
The figure below shows the current status of this demo.
Communications
In this demo there are two different kind of communication between its actors.
On the one hand, the link between the GCS and the MAV follows a client-server communication pattern. The GCS works as a server using a micro-ROS-Agent application, while the MAV works as a client through a micro-ROS-Client application.
On the other hand, the link between the MAV and the Remote Sensors follows a peer-to-peer pattern. Both actors works as clients communicating through a micro-ROS-Agent application running on the Remote Sensors side. In that case, the micro-ROS-Agent application works as a centralized broker where the MAV and the Remote Sensors exchange its topics without ROS 2 output. This application also allows the MAV to discover the Remote Sensors dynamically.
Hardware
The following is a list of the hardware needed to reproduce this demo:
- 1 x Crazyflie 2.1,
- 1 x Crazyradio PA,
- 1 x Flow deck v2,
- 1 x Crazyflie-compatible remote controller.
How to build and flash the firmware?
- Run the builder Docker:
docker-compose run cf_builder - Build the micro-ROS firmware inside the Docker:
ros2 run micro_ros_setup configure_firmware.sh crazyflie_position_publisher ros2 run micro_ros_setup build_firmware.sh -
Put the Crazyflie in DFU mode following the official instructions.
- Flash the micro-ROS firmware:
ros2 run micro_ros_setup flash_firmware.sh
How to use?
To start the application just three steps are needed:
-
Install and connect the Crazyradio PA (it require setting udev permissions).
-
Up the Docker Compose:
docker-compose up -d
- Connect to the Crazyflie.
To stop the application just down the Docker Compose:
docker-compose down
Purpose of the project
The software is not ready for a production use. It has neither been developed nor tested for a specific use case. However, the license conditions of the applicable Open Source licenses allow you to adapt the software to your needs. Before using it in a safety relevant setting, make sure that the software fulfills your requirements and adjust ot according to any applicable safety standards (e.g. ISO 26262).