Overview
In addition to the above entry-level tutorials, we created a collection of demos that showcase micro-ROS in real applications which are easy to reproduce by the community — and thus you. Unlike tutorials, we do not explain the demo code step by step, but provide ready-to-use Docker files to get you started as quickly as possible.
Below, you can find a table Choose yourself:
| Demo | RTOS | Hardware* | |
|---|---|---|---|
| Kobuki Demo |  |
NuttX | Kobuki Turtlebot2, Olimex LTD STM32-E407 |
| Crazyflie Demo |  |
FreeRTOS | Crazyflie 2.1 Drone |
| ToF Sensor Demo |  |
Zephyr | STM32L4 Discovery kit IoT |
| OpenManipulator-X Demo | 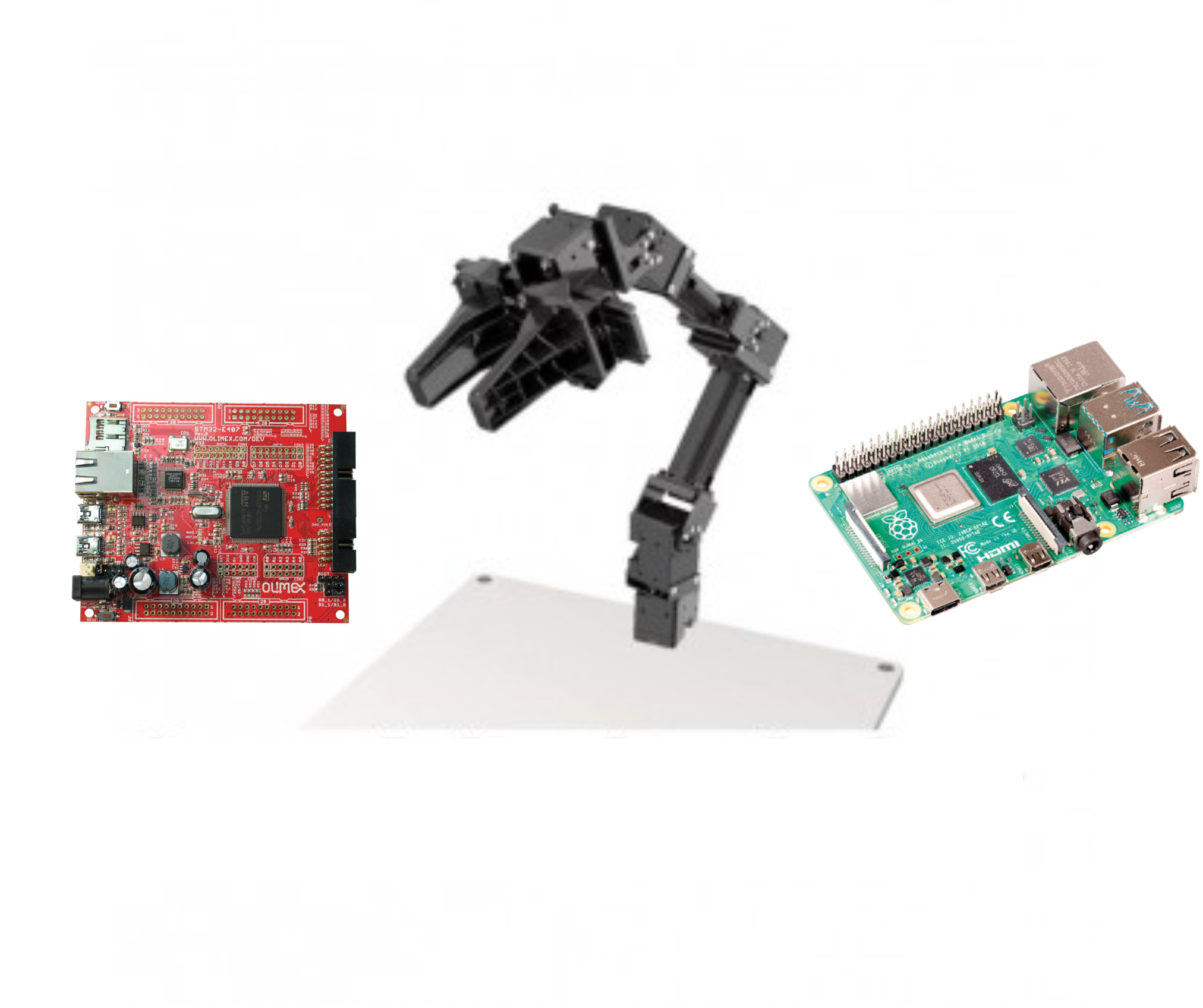 |
Zephyr | Robotis OpenMANIPULATOR-X, Olimex LTD STM32-E407, Raspberry Pi 4 |
| Interfacing with FIWARE Context Broker | – | – | |
| DemoBox Power and Boot Time | 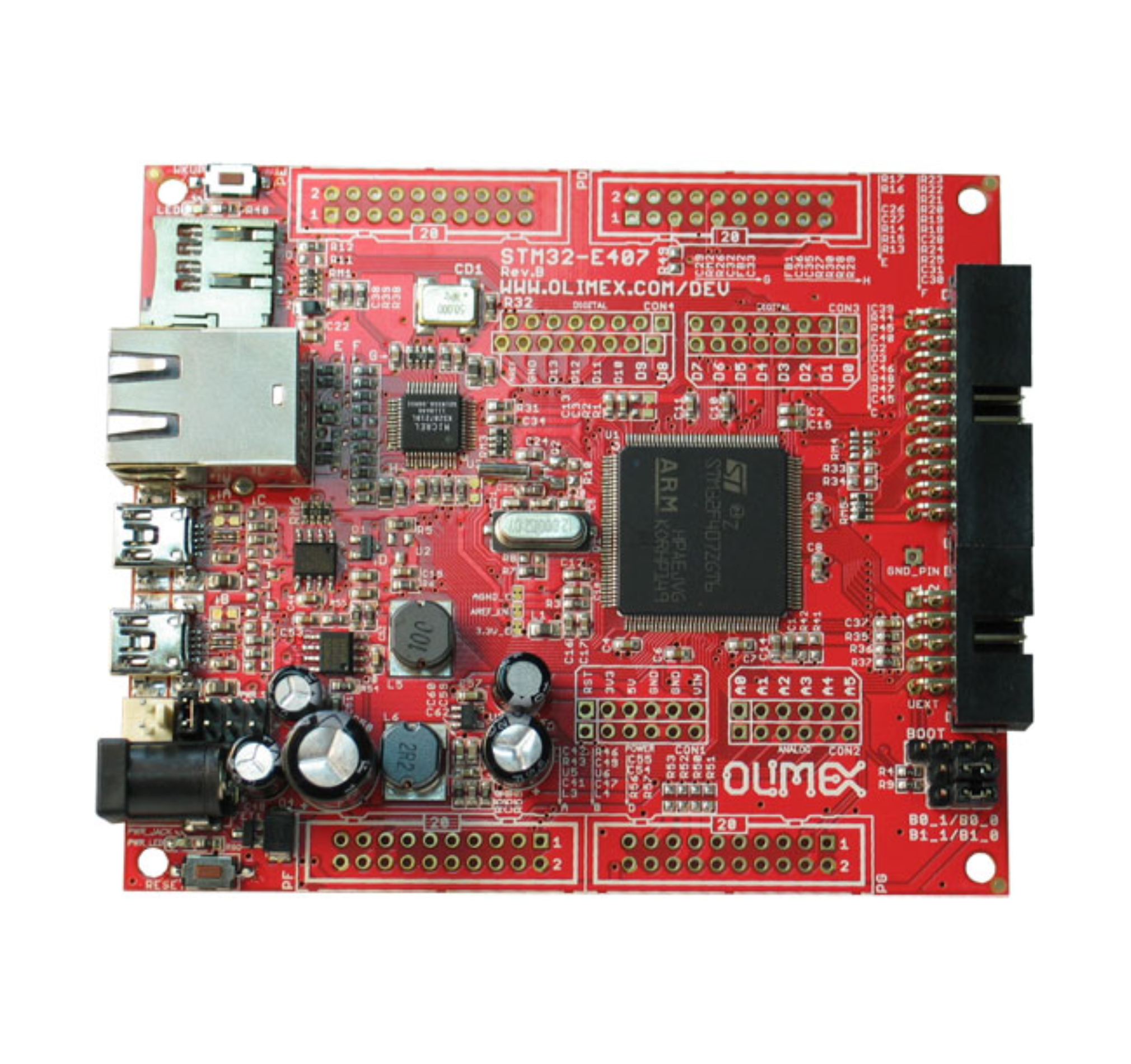 |
NuttX | Olimex LTD STM32-E407, Raspberry Pi 4 |
| Thumper, a six-wheeled robot | 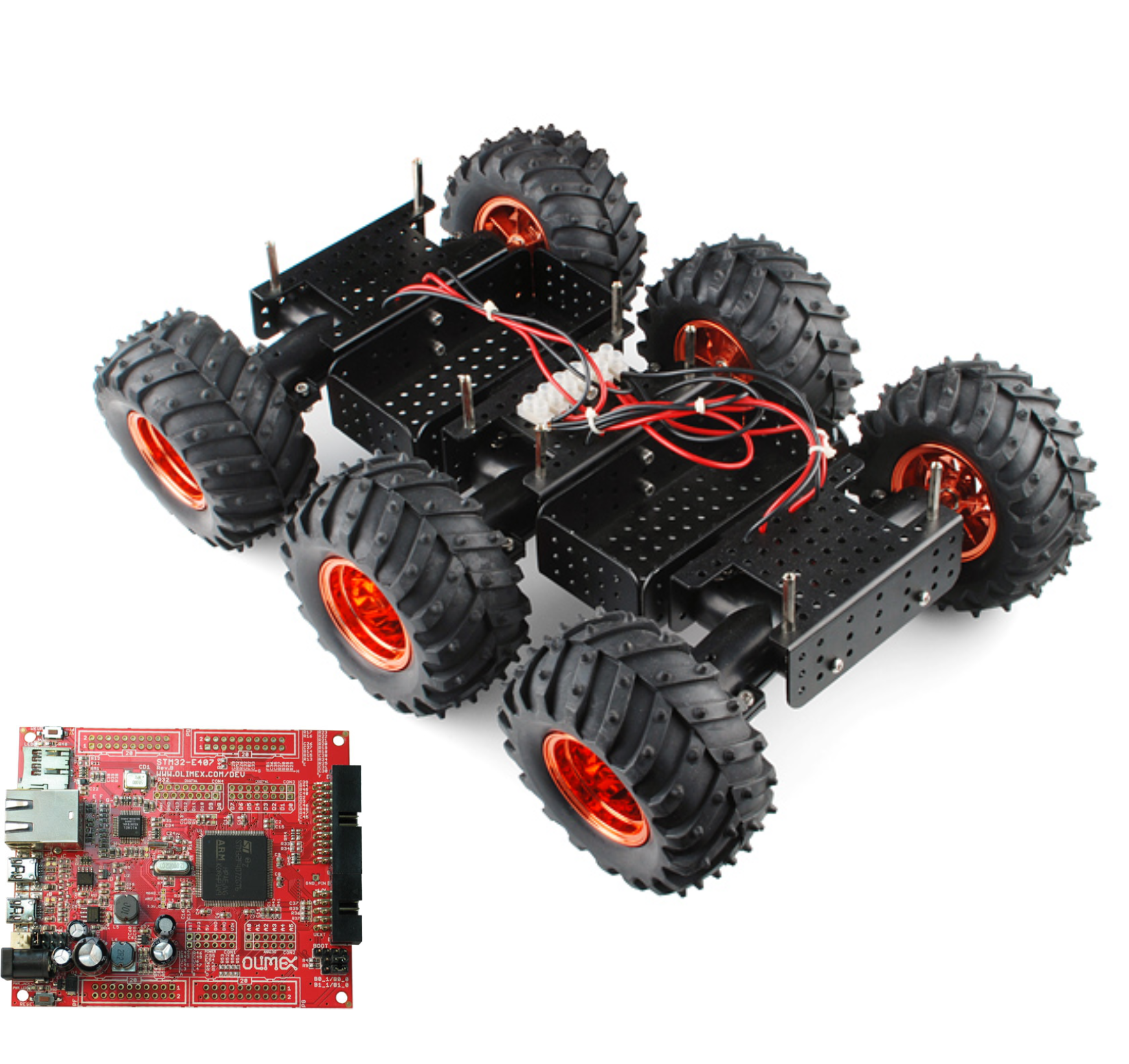 |
NuttX | Wild Thumper 6WD, Olimex LTD STM32-E407 |
| MoveIt 2 Demo | |
Zephyr | STM32L4 Discovery kit IoT |
| Edge Impulse AI demo |  |
Arduino | Arduino Portenta H7, Vision shield |
| Combined Demos | – | – |
*As a matter of course, in addition to the hardware detailed above, you'll need a computer/laptop, various cables, and further auxiliary equipment.
WIP: The demos may also interface with the FIWARE Context Broker, which is the core of the FIWARE open source initiative for context data management. Learn more at Interfacing with FIWARE Context Broker.
WIP: The demos can be combined in several ways to demonstrate further functionalities. Go to Combined Demos to learn more about these combinations and how to launch them.