RECENT POSTS
- Book chapter on micro-ROS published
- Vulcanexus includes micro-ROS
- micro-ROS Humble Hawksbill release
- micro-ROS fully supports ROS 2 features
- Micro-ROS at ROS World Workshop on Execution Management
- embeddedRTPS the new experimental middleware for micro-ROS
- micro-ROS at PX4 Development Summit 2021
- Microsoft Azure RTOS integrates micro-ROS
- Renesas and eProsima Simplify Development of Professional Robotics Applications on RA MCUs with micro-ROS Development Framework
- Timeout RMW & QoS in RCLC APIs
- All posts ...
New support for graphs
Nov 12, 2020 francesca-finocchiaro
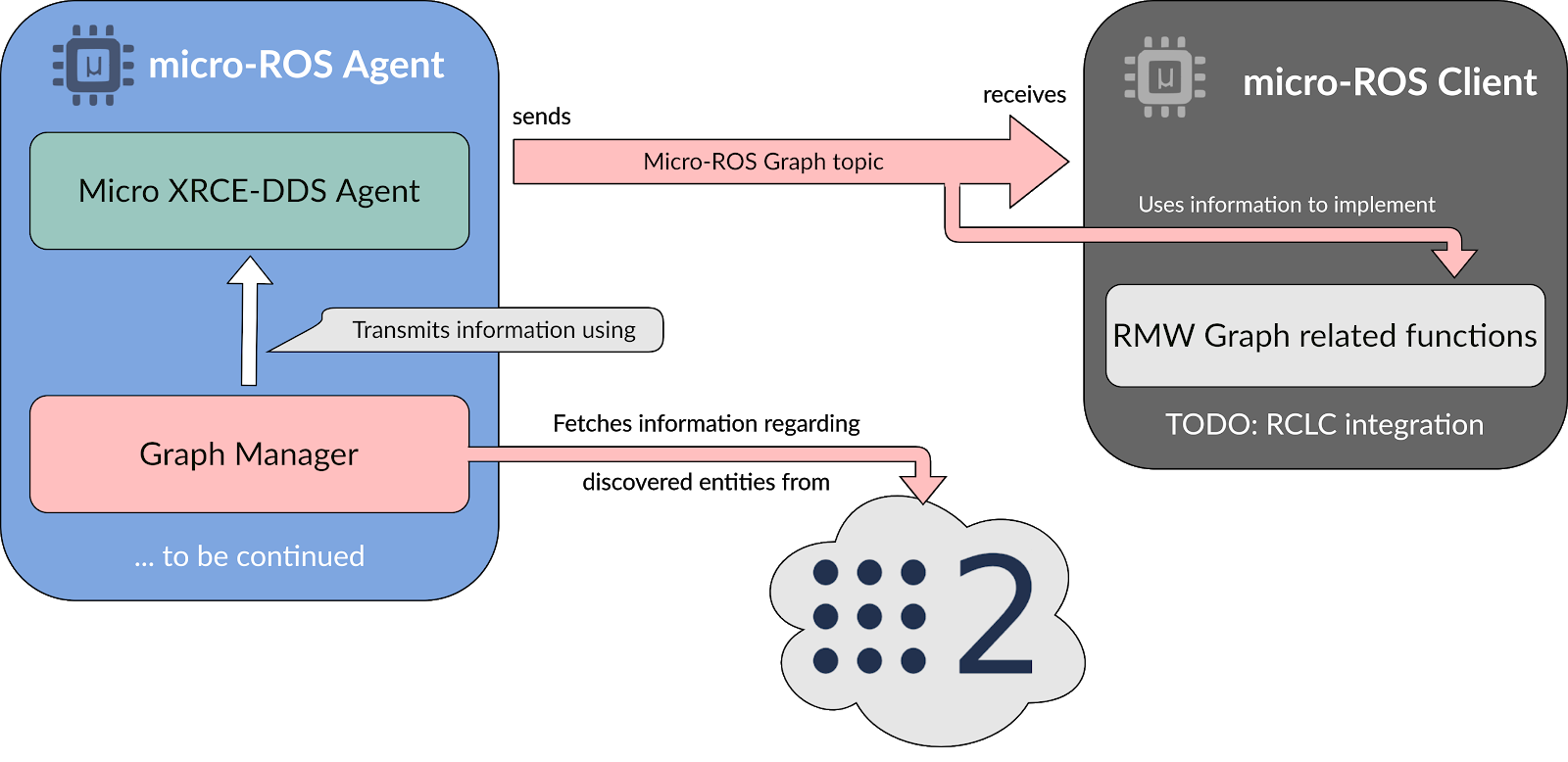
We are getting every day closer to bringing the complete ROS 2 feature list into micro-ROS. Our last effort towards this direction is the inclusion of a dedicated graph manager into the micro-ROS Agent and Client’s RMW, marking the first big divergence point between the former and the Micro XRCE-DDS Agent, and providing micro-ROS with unprecedented introspection capabilities.
To do so, we have added a DDS participant into the Agent that scans the network in search of the available ROS 2 entities (nodes, publishers, subscribers, services and so on), and publishes them onto a specific topic, which is listened to by the RMW. From this layer, the ROS 2 graph information is fetched by the upper layers and passed to the user.
This is complemented by the ability of micro-ROS to also inject information about its own ROS 2 entities into the ROS 2 global dataspace, so that users executing graph-related tasks can gather information about which micro-ROS entities are present at the moment.
Examples to guide the user on how to use this new feature can be found here.
Share on: