RECENT POSTS
- Book chapter on micro-ROS published
- Vulcanexus includes micro-ROS
- micro-ROS Humble Hawksbill release
- micro-ROS fully supports ROS 2 features
- Micro-ROS at ROS World Workshop on Execution Management
- embeddedRTPS the new experimental middleware for micro-ROS
- micro-ROS at PX4 Development Summit 2021
- Microsoft Azure RTOS integrates micro-ROS
- Renesas and eProsima Simplify Development of Professional Robotics Applications on RA MCUs with micro-ROS Development Framework
- Timeout RMW & QoS in RCLC APIs
- All posts ...
micro-ROS goes AIoT!
Nov 18, 2020 francesca-finocchiaro
We’re working with the LUXonis team on the integration of micro-ROS with an exciting AIoT (Artificial Intelligence of Things) project, involving the DepthAI BW1092 board. This small device enables interacting with LUXonis DepthAI SoM from an ESP32 microcontroller.
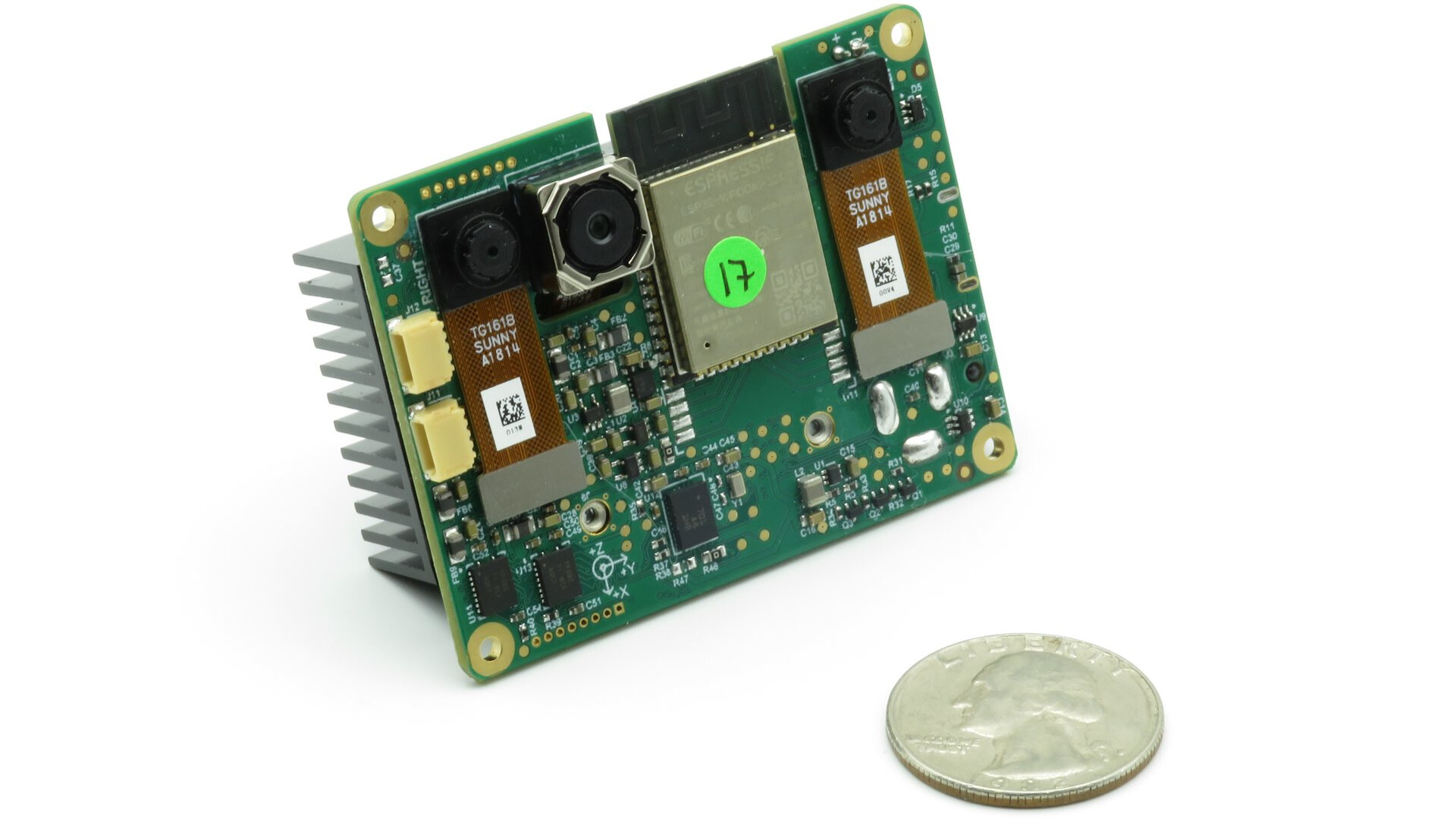
DepthAI is a platform built around the Myriad X which combines depth perception, neural inference and object tracking, all accessible via a Python API and a plug/play SoM with open-source hardware. It comes integrated with a variety of platforms, and in the case of the board we use for our project, it brings these capabilities to the embedded world.
The DepthAI BW1092 features three cameras (a general one, plus two allowing for stereoscopic vision), making it possible to run 3D object detection out of the box. In turn, this allows retrieving the metadata coming out of a Neural Network, running inside the Myriad X processor, into the development environment of the ESP32 MCU. Thanks to the integration with micro-ROS, it will be possible to bring these data to the ROS 2 ecosystem, exposing ROS 2 topics with the results of classification networks with spatial vision coming out of an embedded device.
If we get lucky with the integration we might be seeing soon our next PointCloud message coming directly from the DepthAI spatial vision calculations!
Share on: