RECENT POSTS
- Book chapter on micro-ROS published
- Vulcanexus includes micro-ROS
- micro-ROS Humble Hawksbill release
- micro-ROS fully supports ROS 2 features
- Micro-ROS at ROS World Workshop on Execution Management
- embeddedRTPS the new experimental middleware for micro-ROS
- micro-ROS at PX4 Development Summit 2021
- Microsoft Azure RTOS integrates micro-ROS
- Renesas and eProsima Simplify Development of Professional Robotics Applications on RA MCUs with micro-ROS Development Framework
- Timeout RMW & QoS in RCLC APIs
- All posts ...
A brand new discovery mechanism in micro-ROS
Sep 30, 2020 francesca-finocchiaro
micro-ROS is now implementing client/server handshaking by discovery!
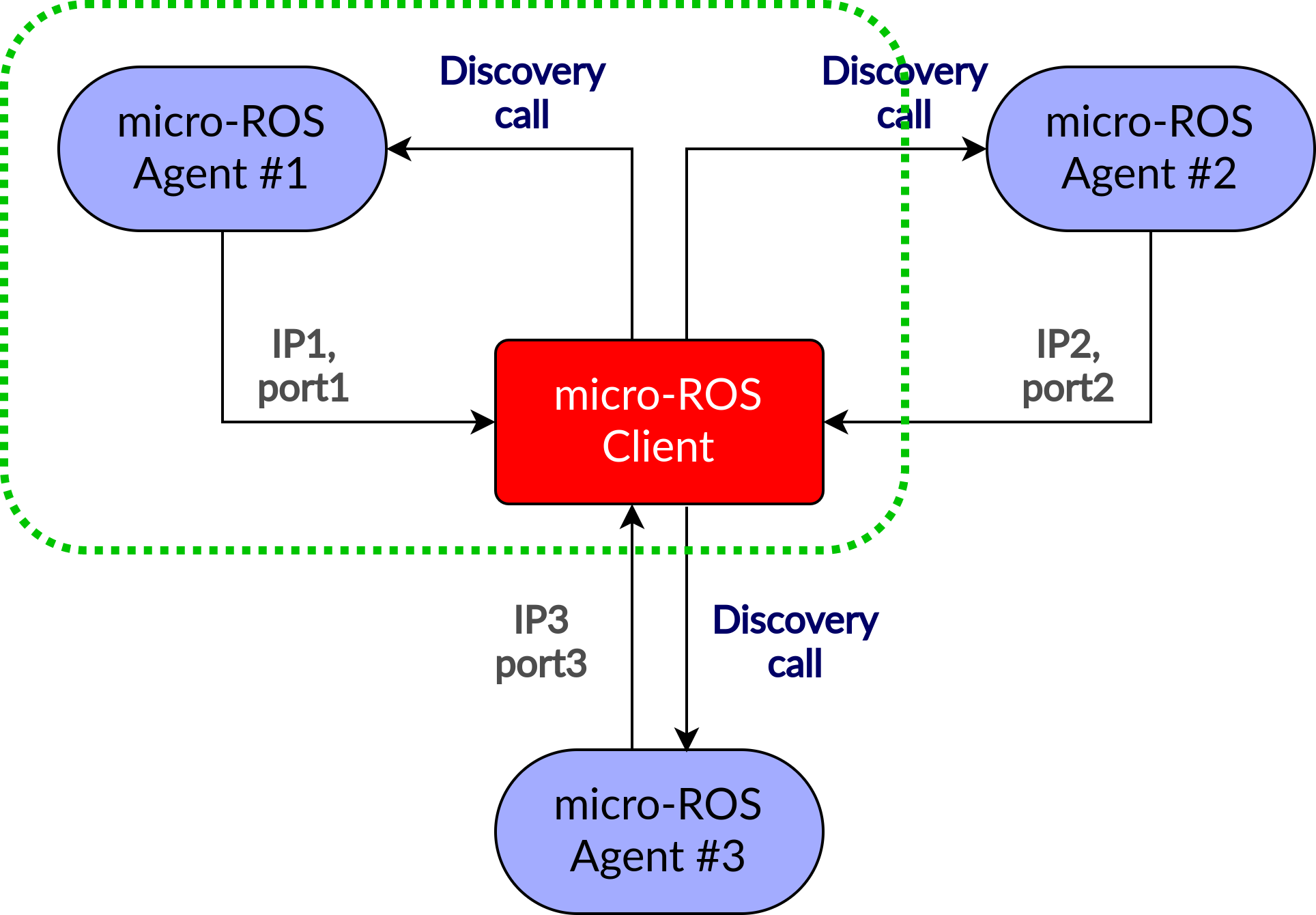
The discovery mechanism allows micro-ROS Clients to discover Agents in the network by UDP. If a Client doesn’t know of any Agent beforehand, it sends a discovery call by multicast and the reachable Agents respond by sending information about them, such as their IP and port. The Client matches automatically with the first Agent that provides information, and the communication between the matched entities proceeds in the usual way.
micro-ROS inherits its discovery mechanism from the Micro XRCE-DDS library, which is then implemented in the RMW layer. Discovery is accessible by default at the Client level when using UDP transport, and can be activated in the Agent by using the -d flag when running it from terminal with the snap command:
micro-xrce-dds-agent udp4 <args> -d
If you’re running instead the daemonized version of the Agent via the provided snap service, you can turn on the discovery mechanism like this:
snap set micro-xrce-dds-agent discovery="true"
Find here an example showing how to use this new feature!
Share on: